
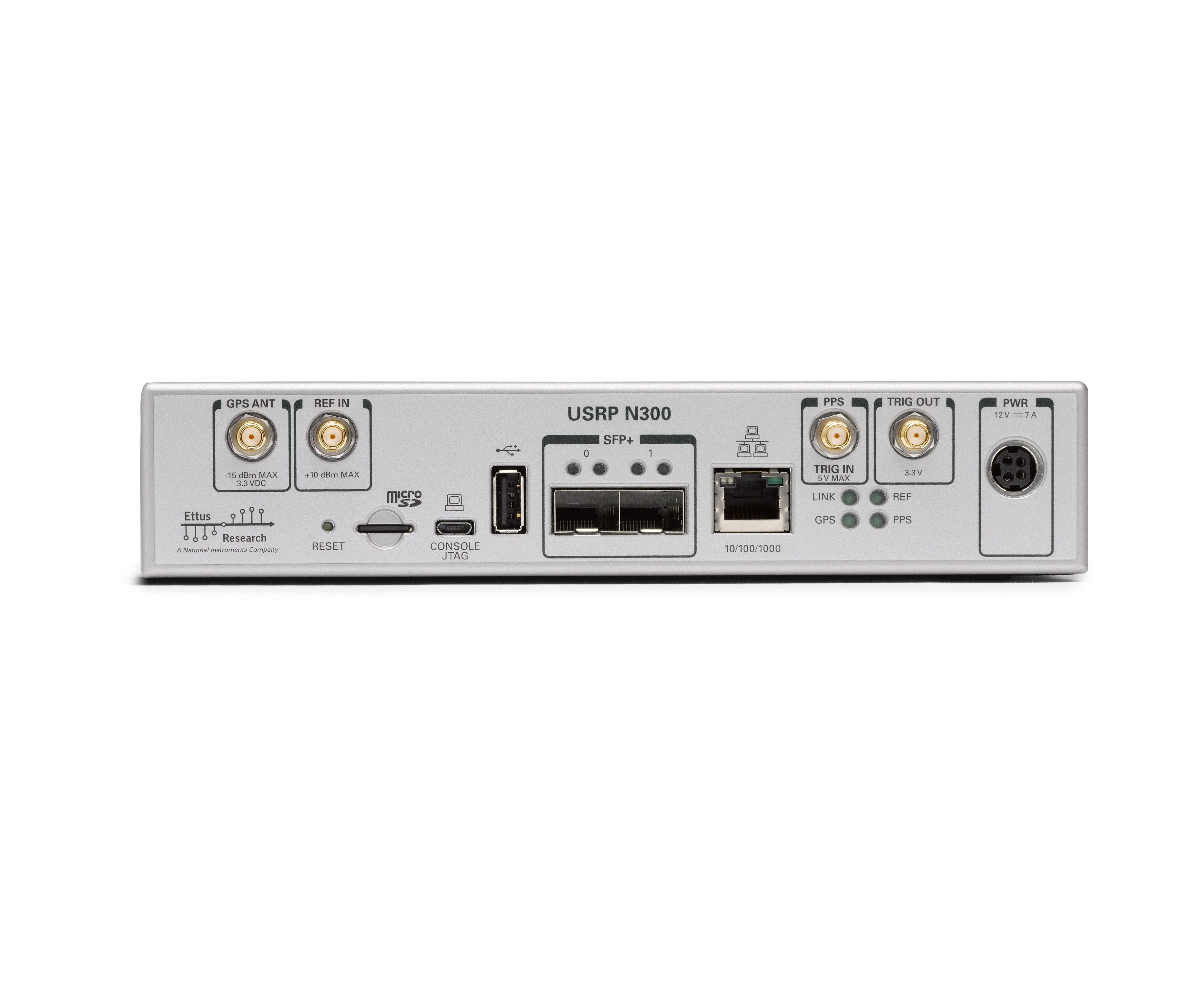


USRP N300
$13,702.00 USDUSRP N300 (NON-TPM, ZYNQ-7035, 2 CHANNELS, 10 MHZ - 6 GHZ, 10 GIGE)
The USRP N300 is a lower cost variant of the USRP N310 networked software defined radio, that provides reliability and fault-tolerance for deployment in large-scale and distributed wireless systems.
-
Overview
-
Overview
The USRP N300 is a networked software defined radio (SDR) that provides reliability and fault-tolerance for deployment in large-scale and distributed wireless systems. The USRP N300 device simplifies control and management of a network of radios by introducing the unique capability to remotely perform tasks such as updating software, rebooting, factory resetting, self-testing, host PC/ARM debugging and monitoring system health.
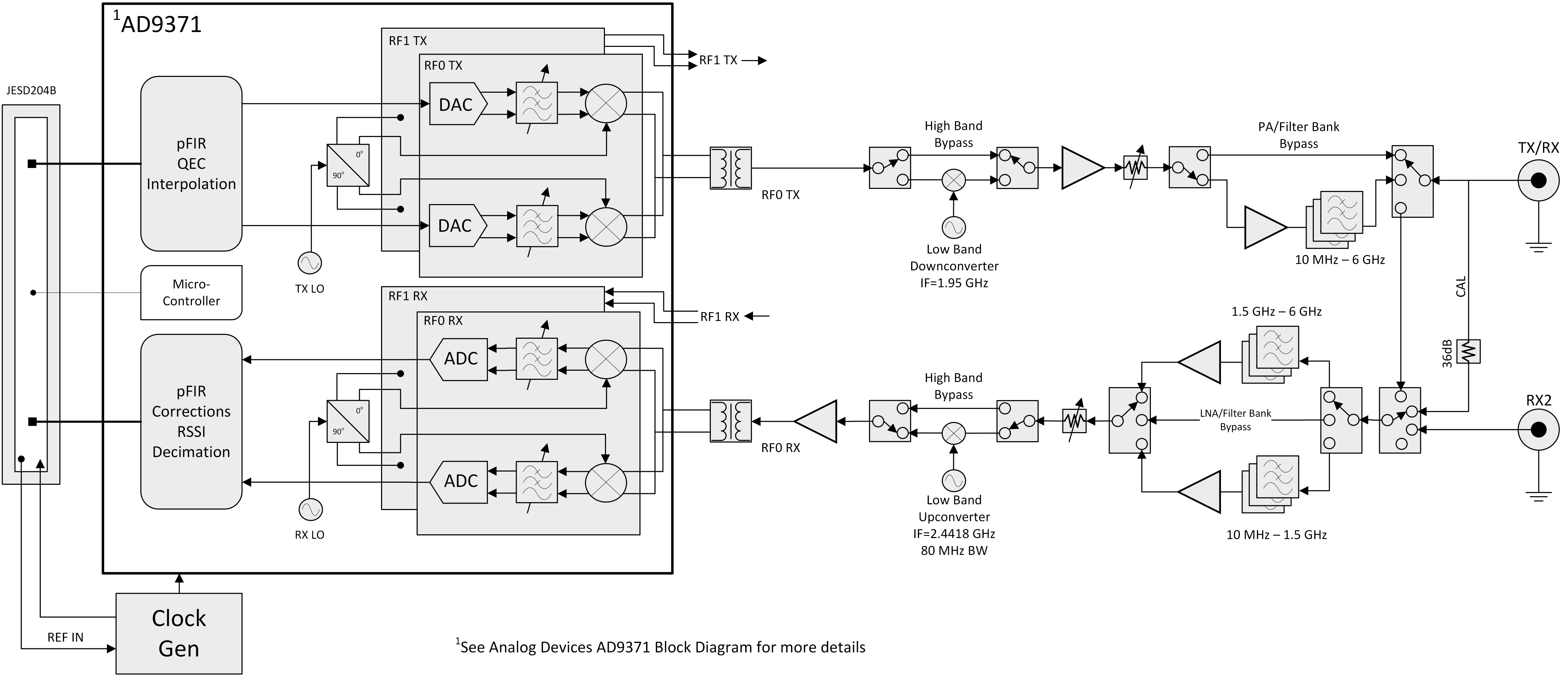
The RF front end uses an AD9371 transceiver, the latest RFIC technology from Analog Devices, to provide 2X2 MIMO capability, up to 100 MHz of instantaneous bandwidth, and an extended frequency range from 10 MHz to 6 GHz.
The open-source USRP Hardware Driver (UHD) API and RF Network-on-Chip (RFNoC) FPGA development framework reduce software development effort and integrate with a variety of industry-standard tools such as GNU Radio. Users can rapidly prototype and reliably deploy designs for a variety of SDR applications such as wireless testbeds, remote radio heads, spectrum monitoring, and more. Please note that the USRP N300 is not designed for fast tuning. For information on products for frequency hopping applications, contact [email protected].
Baseband Processor
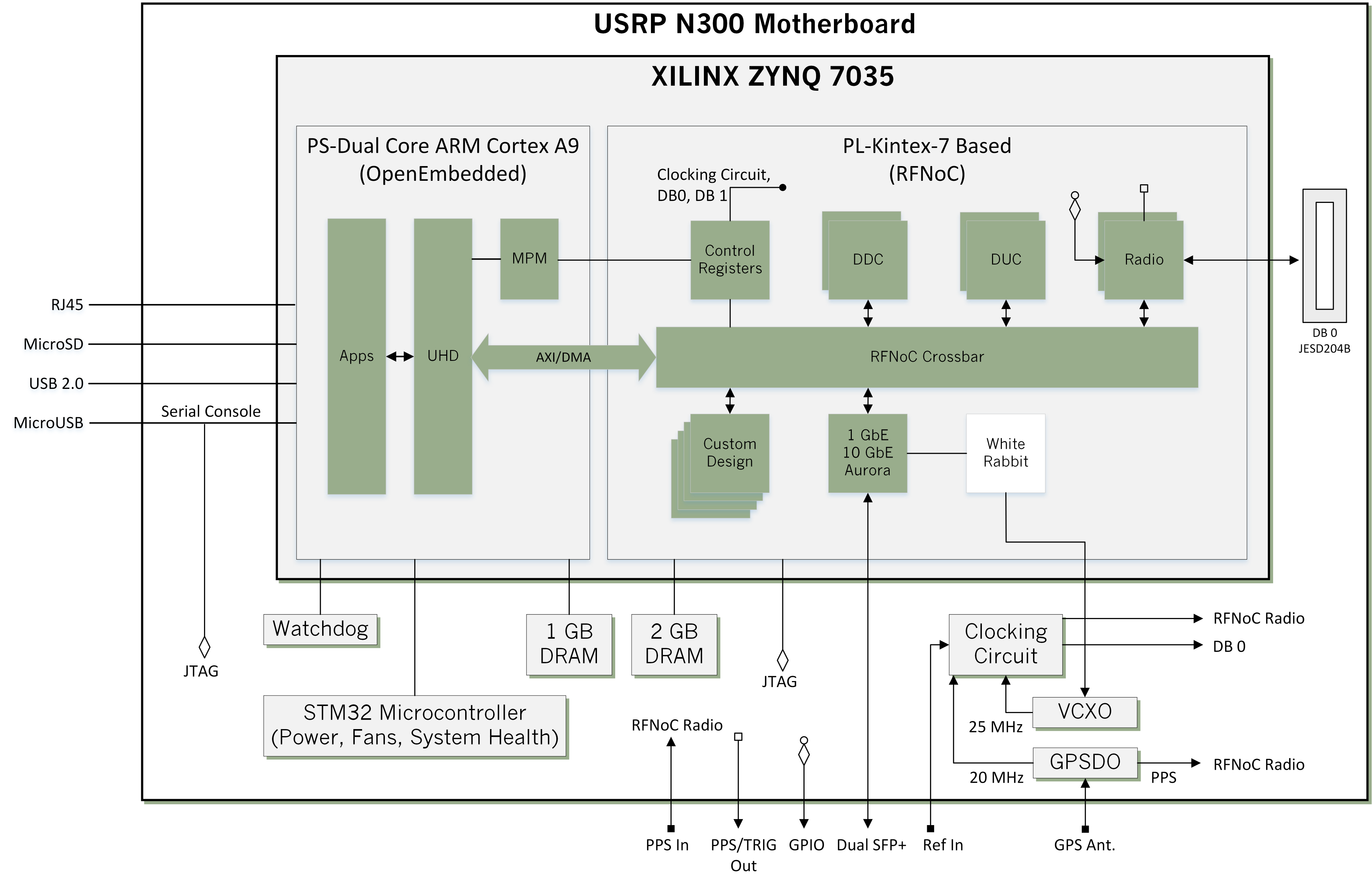
The baseband processor uses the Xilinx Zynq-7035 SoC to deliver a large user-programmable FPGA for real-time and low-latency processing and a dual-core ARM CPU for stand-alone operation. Users can deploy applications directly on to the preinstalled embedded Linux operating system or stream samples to a host computer using high-speed interfaces such as 1 Gigabit Ethernet, 10 Gigabit Ethernet, and Aurora over two SFP+ ports.
Synchronization
The USRP N300 has a flexible synchronization architecture with support for traditional SDR synchronization methods such as clock reference, PPS time reference, and GPSDO, which enable implementation of high channel count MIMO systems. In addition, the USRP N300 uniquely features Ethernet-based synchronization using the open-source White Rabbit timing protocol. White Rabbit enables precise baseband synchronization over large distances in GPS-denied environments. For more information, see the “Using Ethernet-Based Synchronization on the USRP N3xx Devices” application note on the Ettus Research Knowledgebase.
-
Features
-
Features
- Reliable and fault-tolerant deployment
- Remote management capability
- Stand-alone (embedded) or host-based (network streaming) operation
- Fully integrated and assembled (the USRP N300 does not support swappable daughtercards)
- 10 MHz to 6 GHz extended frequency range
- Up to 100 MHz of instantaneous bandwidth per channel
- 2 RX, 2TX in half-wide RU form factor[1]
- RX, TX filter bank
- 16 bit ADC, 14 bit DAC
- Configurable sample rates: 122.88, 125, and 153.6 MS/s
- Xilinx Zynq-7035 SoC
- Dual-core ARM Cortex-A9 800 MHz CPU
- Two SFP+ ports (1 Gigabit Ethernet, 10 Gigabit Ethernet, Aurora)
- RJ45 (1 GbE) [2]
- Clock reference
- PPS time reference
- Built-in GPSDO
- Ethernet-based synchronization using White Rabbit protocol
- 1 Type A USB host port
- 1 micro-USB port (serial console, JTAG)
- Watchdog timer
- CE certified
- OpenEmbedded Linux
- USRP Hardware Driver™ (UHD) open-source software API version 3.11.0.1 or later
- RF Network on Chip (RFNoC™) FPGA development framework
- Xilinx Vivado 2017.4 Design Suite (license not included)
- GNU Radio support maintained by Ettus Research™ through GR-UHD, an interface to UHD distributed by GNU Radio
- USRP N300 does not contain a Trusted Platform Module
[1] The RF front-end uses an AD9371 transceiver that is independently tunable. The transceiver is capable of 2X2 MIMO operation.
[2] The RJ45 port is used for remote management of the device and does not support IQ streaming.
-
Block Diagram
-
Block Diagram
 Click on image to enlarge
Click on image to enlarge
 Click on image to enlarge
Click on image to enlarge
-
Additional Resources
-
Additional Resources
- USRP N300 Getting Started Guide
- USRP N300 Hardware Resources
- USRP N300 Schematics
- Building and Installing UHD and GNU Radio Application Note
- Verifying USRP Operation Application Note
- RFNoC Development Application Note
- Getting Started With UHD and C Application Note
- Using Ethernet-Based Synchronization Application Note
- USRP Support from MathWorks Communications Toolbox
- Need a conduction-cooled rugged enclosure? – Contact Pixus Technologies
Kit Contents
- USRP N300
- RJ45 Ethernet Cable
- SFP+ to RJ45 Adapter
- Micro-USB cable
- Imaged microSD Card
- Power Supply
Recommended Accessories
- 10 Gigabit Ethernet Card for Desktops
- 10 Gigabit Ethernet Cable with SFP+ termination
- Octoclock CDA-2990
- GPIO Expansion Kit
- 3V Active GPS Antenna
Related Products
Overview
The USRP N300 is a networked software defined radio (SDR) that provides reliability and fault-tolerance for deployment in large-scale and distributed wireless systems. The USRP N300 device simplifies control and management of a network of radios by introducing the unique capability to remotely perform tasks such as updating software, rebooting, factory resetting, self-testing, host PC/ARM debugging and monitoring system health.
The RF front end uses an AD9371 transceiver, the latest RFIC technology from Analog Devices, to provide 2X2 MIMO capability, up to 100 MHz of instantaneous bandwidth, and an extended frequency range from 10 MHz to 6 GHz.
The open-source USRP Hardware Driver (UHD) API and RF Network-on-Chip (RFNoC) FPGA development framework reduce software development effort and integrate with a variety of industry-standard tools such as GNU Radio. Users can rapidly prototype and reliably deploy designs for a variety of SDR applications such as wireless testbeds, remote radio heads, spectrum monitoring, and more. Please note that the USRP N300 is not designed for fast tuning. For information on products for frequency hopping applications, contact [email protected].
Baseband Processor
The baseband processor uses the Xilinx Zynq-7035 SoC to deliver a large user-programmable FPGA for real-time and low-latency processing and a dual-core ARM CPU for stand-alone operation. Users can deploy applications directly on to the preinstalled embedded Linux operating system or stream samples to a host computer using high-speed interfaces such as 1 Gigabit Ethernet, 10 Gigabit Ethernet, and Aurora over two SFP+ ports.
Synchronization
The USRP N300 has a flexible synchronization architecture with support for traditional SDR synchronization methods such as clock reference, PPS time reference, and GPSDO, which enable implementation of high channel count MIMO systems. In addition, the USRP N300 uniquely features Ethernet-based synchronization using the open-source White Rabbit timing protocol. White Rabbit enables precise baseband synchronization over large distances in GPS-denied environments. For more information, see the “Using Ethernet-Based Synchronization on the USRP N3xx Devices” application note on the Ettus Research Knowledgebase.
Features
- Reliable and fault-tolerant deployment
- Remote management capability
- Stand-alone (embedded) or host-based (network streaming) operation
- Fully integrated and assembled (the USRP N300 does not support swappable daughtercards)
- 10 MHz to 6 GHz extended frequency range
- Up to 100 MHz of instantaneous bandwidth per channel
- 2 RX, 2TX in half-wide RU form factor[1]
- RX, TX filter bank
- 16 bit ADC, 14 bit DAC
- Configurable sample rates: 122.88, 125, and 153.6 MS/s
- Xilinx Zynq-7035 SoC
- Dual-core ARM Cortex-A9 800 MHz CPU
- Two SFP+ ports (1 Gigabit Ethernet, 10 Gigabit Ethernet, Aurora)
- RJ45 (1 GbE) [2]
- Clock reference
- PPS time reference
- Built-in GPSDO
- Ethernet-based synchronization using White Rabbit protocol
- 1 Type A USB host port
- 1 micro-USB port (serial console, JTAG)
- Watchdog timer
- CE certified
- OpenEmbedded Linux
- USRP Hardware Driver™ (UHD) open-source software API version 3.11.0.1 or later
- RF Network on Chip (RFNoC™) FPGA development framework
- Xilinx Vivado 2017.4 Design Suite (license not included)
- GNU Radio support maintained by Ettus Research™ through GR-UHD, an interface to UHD distributed by GNU Radio
- USRP N300 does not contain a Trusted Platform Module
[1] The RF front-end uses an AD9371 transceiver that is independently tunable. The transceiver is capable of 2X2 MIMO operation.
[2] The RJ45 port is used for remote management of the device and does not support IQ streaming.
Block Diagram
Click on image to enlarge
Click on image to enlarge
Additional Resources
- USRP N300 Getting Started Guide
- USRP N300 Hardware Resources
- USRP N300 Schematics
- Building and Installing UHD and GNU Radio Application Note
- Verifying USRP Operation Application Note
- RFNoC Development Application Note
- Getting Started With UHD and C Application Note
- Using Ethernet-Based Synchronization Application Note
- USRP Support from MathWorks Communications Toolbox
- Need a conduction-cooled rugged enclosure? – Contact Pixus Technologies
Kit Contents
- USRP N300
- RJ45 Ethernet Cable
- SFP+ to RJ45 Adapter
- Micro-USB cable
- Imaged microSD Card
- Power Supply
Recommended Accessories
- 10 Gigabit Ethernet Card for Desktops
- 10 Gigabit Ethernet Cable with SFP+ termination
- Octoclock CDA-2990
- GPIO Expansion Kit
- 3V Active GPS Antenna
Related Products
Compatible Products
-
Compatible Products
-






